The goal of computer vision research is to teach computers to recognize objects and scenes in their surroundings. As robots need to be able to pick up on their surroundings and adapt accordingly, this is a crucial skill for the field. In this article, I would like to take a look at the current challenges in the field of robotics and discuss the relevance and applications of computer vision in this area.
By incorporating computer vision methods and algorithms into robots, they are able to view and understand their environment. This integration has allowed robotics to perform essential tasks for a wide range of industries and uses, including industrial automation, healthcare, and service robots. These tasks include object recognition, tracking, navigation, and scene understanding.
Computer vision is crucial to robotics because it allows robots to see and interpret their environment. Thanks to this capability, robots can perform tasks such as object identification and tracking, navigation, and scene interpretation. These responsibilities are crucial for robots to perform their functions and make judgments in a dynamic setting.
Computer vision enables a more human-like and natural connection between people and robots. In this article, we will discuss the role of computer vision in robotics, including its applications and challenges, with a focus on object recognition and tracking, navigation, and scene interpretation. In this course, we will also examine many computer vision systems now in use by robotics researchers. The purpose of this article is to provide a high-level overview of computer vision in robotics and its implications for the field.
Computer Vision Tasks in Robotics
Robotics relies on computer vision for a variety of functions, including the detection and understanding of their environments. The most common activities are navigation, object recognition and tracking, and scene understanding.
Object Recognition and Tracking
Object recognition and tracking refer to the process of locating and following individual objects in a live video feed. Recognizing things and tracking their movement to provide information about their position and velocity is a crucial skill for robots to master.
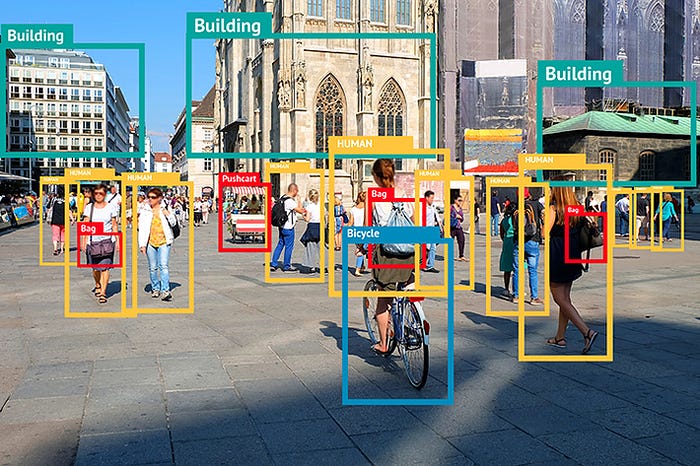
Industrial automation, security and surveillance, and service robots are just a few examples of fields that might benefit from robotics’ ability to identify and track objects. Industrial automation’s object detection and tracking, for instance, may monitor components as they move down the assembly line. Finding and following individuals or vehicles of interest is a common use of object recognition and tracking in security and surveillance. Service robots may employ object recognition and tracking to locate and track items that need to be picked up, carried, or otherwise moved.
Object recognition and tracking algorithms include the CamShift algorithm, Kalman filter, and Particle filter, among others. These algorithms use a wide range of techniques, including color histograms, edge detection, and feature matching, to identify and follow objects in a scene.
Navigation
A robot’s ability to move around its surroundings is referred to as navigation. Since it allows robots to go to diverse places and complete out jobs, this activity is crucial to robotics.
Robotics utilizes navigation in many various applications, such as industrial automation, search and rescue, and service robots. For instance, navigation may be used in industrial automation to move robots to different areas along a manufacturing line to carry out jobs. Robots may be relocated to multiple areas during search and rescue operations in order to hunt for survivors utilizing navigation. Using the navigation, service robots may be dispatched to different regions to carry out activities like cleaning or delivering products.
Several methods are used for navigating, such as the A* algorithm, the Dijkstra algorithm, and the Rapidly-exploring Random Tree (RRT) technique. These algorithms use a wide range of techniques, including as route planning and obstacle avoidance, to navigate their environment.
Scene Understanding
The act of learning about a scene and the things in it is called scene understanding. This is crucial to robotics because it allows machines to learn about their environments and act accordingly.

Industrial automation, search and rescue, and service robots are just some of the many applications for scene understanding in robotics. For instance, scene understanding can be used in industrial automation to recognize and sort a wide range of components along the manufacturing process. Search-and-rescue operations can benefit from scene comprehension by using it to locate and classify objects in a disaster zone. Service robots can use scene understanding to recognize and sort various types of objects that need to be picked up or otherwise handled.
Some of the methods used for scene interpretation include Convolutional Neural Networks (CNNs), a deep learning-based methodology, and more conventional computer vision-based techniques like SIFT and SURF.
Comet Artifacts lets you track and reproduce complex multi-experiment scenarios, reuse data points, and easily iterate on datasets. Read this quick overview of Artifacts to explore all that it can do.
Future of Computer Vision in Robotics
By allowing robots to view and interpret their environment, computer vision has the potential to change the domain of robotics. With researchers striving to address the faults and boost their performance, the future of computer vision in robots appears bright. Future breakthroughs in robotic computer vision include some of the following:
Advancements in Deep Learning
Deep learning is a subfield of machine learning that makes use of artificial neural networks to simulate complex relationships between inputs and outcomes.
Improvements in computer vision enabled by deep learning will enable robots to better understand their environments and complete tasks.
Advances in computer vision made possible by deep learning will allow robots to carry out more complex tasks and make more sound decisions.
Some recent examples:
Robotic systems that learned to grab and manipulate things with human-like dexterity was demonstrated by Google Brain researchers in 2018 utilizing deep reinforcement learning. A combination of simulated and real-world data was used to train the system, enabling it to generalize to new objects and tasks.
Deep learning models for computer vision problems have been extensively trained using ImageNet, a sizable dataset of labeled images. The dataset has significantly improved object detection and classification techniques and enabled a variety of robotics and other disciplines applications.
Simultaneous Localization and Mapping (SLAM) is a technology used in robotics to map uncharted locations and determine the robot’s location within such maps using only visual information. Robots can now navigate more successfully in complex and dynamic surroundings thanks to deep learning techniques that increase the accuracy and efficiency of visual SLAM algorithms.
Integration with Robotics Platforms
The addition of computer vision systems to already-existing robotics platforms is referred to as integration with robotics platforms. Robots can advance in sophistication and utility by performing tasks and making decisions with the help of computer vision.
Incorporating robotics platforms into a robot’s design will let the robot utilize computer vision to do tasks and make decisions, increasing the robot’s complexity and capabilities.
Development of New Algorithms
When we talk about making new algorithms, we mean ones that can make computer vision systems for robots work better. This should help you do a lot of things, like find your way around a new place or figure out what’s going on in a place you already know.
As new algorithms are added to robotics, computer vision will definitely get better. This will allow robots to do more difficult tasks and make better decisions.
These are some things that are likely to change in computer vision for robots. As the field of robotics develops, it’s likely that computer vision will be used more and more. This will give robots the ability to see and understand their surroundings.
Challenges in Computer Vision for Robotics
There have been improvements in computer vision, but robots still have a long way to go before they can use it properly. Here are some examples of such problems:
Robustness
The strength of a computer vision system is measured by how well it works under a wide range of real-world conditions. Conditions in the real world, such as changes in lighting, shadows, and occlusions, can have a big effect on how well computer vision systems work. This is a big challenge for robotics.
Robotics depends a lot on computer vision systems, and these systems can only be truly useful if they can give accurate information in a wide range of situations and with real-world objects. This is important for tasks like recognizing and tracking objects, navigating, and understanding scenes.
Real-time Performance
Real-time performance means that a computer vision system can analyze data as it is being collected and give results as they are being made. This is a big problem for robotics because self-driving machines need up-to-date information in order to make decisions and do tasks.
In the robotics industry, real-time performance is important so that robots can make decisions and do tasks based on the most up-to-date information. This is important for tasks like recognizing and following objects, navigating, and understanding scenes.
Computational Efficiency
Computational efficiency is a term used to describe how quickly and accurately a computer vision system can process data. This is a big problem for robotics because robots can’t make decisions or do tasks without being able to process information well.
Computational efficiency is important in robotics because it helps robots decide what to do and do it quickly and well. This is important for tasks like recognizing and following objects, navigating, and understanding scenes.
These are just some of the problems that researchers in robotics who work on computer vision have to deal with. In order to deal with these problems, researchers are coming up with new algorithms and strategies that can make information processing more reliable, real-time, and efficient.
Conclusion
The field of computer vision is growing quickly, and robots are starting to use it more and more. It lets robots see and understand their surroundings, so they can do tasks and make choices on their own. Even with these problems, computer vision for robots is a growing field that has the potential to improve performance through deep learning, platform integration, and the development of new algorithms.
In the end, computer vision has the potential to change robotics in a big way by letting machines do hard jobs and make complex decisions. As robotics gets better, it’s likely that computer vision will play a bigger role, making it possible to make machines that are smarter and more useful.
Additional resources:
- Adrian, R. (2017). Deep learning for computer vision with Python.Readers who want assistance understanding and using these strategies can refer to the book’s practical examples and code samples.
- Probabilistic Robotics by Sebastian Thrun, Wolfram Burgard and Dieter Fox, MIT Press. With chapters on perception, control, and planning, this book offers a thorough introduction to robotics. The book has a part on computer vision that discusses things like object detection, feature extraction, and picture processing.
- The ROS (Robot Operating System) website. ROS is an open-source software platform for robotics that includes a wide range of tools and libraries for building and programming robots. The website includes documentation, tutorials, and examples that can help those interested in learning more about robotics and computer vision.
